Determinization example
– nondeterministic FSM to deterministic
Here
we describe one more example – the transformation of a nondeterministic
automaton (FSM) to a deterministic one. Automata are assumed to be language
recognizers (no output), a nondeterministic one can have many initial states
and many final states, a string belongs to the language if there is a path from
an initial to a final state marked by this string (empty or lambda moves are
not included). Thus a simplest possible definition is assumed. For
deterministic automaton the standard language recognizer definition is used.
Automata are defined as sets consisting of state, event (=input alphabet
element) and transition instances. The classical determinization algorithm is
implemented – explore the state powerset (set of all subsets) space, by
starting from the "initial set" and trying to expand the reachable
set of statesets by applying transitions for all possible events and analyzing
whether a new stateset has been reached by the given event (or it is a copy of
existing one). When nothing more can be reached, the reached powerset elements
are coded as new states of the deterministic FSM, and new transitions are
defined accordingly, as well as the initial state and final states.
Actually,
the example is a slightly extended version of a part of MOLA team paper
for MTIP 05 workshop.
Fig. 1 shows the metamodel (source = target), with the StateSet class used during
the algorithm run. Fig. 2 – 6 show the main MOLA program and subprograms
implementing the abovementioned algorithm. Some of the subprograms use
additional MOLA elements not used in the main example.
Fig. 1. Metamodel
of automatons.
Fig. 2. Main MOLA program for the determinization.
Fig. 3. Subprogram FindInitialSet.
Fig. 4. Subprogram
BuildDestSet.
The
next subprogram IdentifySet uses more complicated OCL
expressions in constraints – subexpressions of the form element_name.role_name,
which denote an instance set (if the multiplicity is *) and elementary OCL
operations on sets (here – the set equality). Two
special control constructs – explicit continue (flow to the loop border)
and return (flow to end symbol) are used in the first loop.
Fig. 5. Subprogram
IdentifySet.
The
subprogram BuildDetFSM also uses OCL set
operations in constraints – notEmpty (while the existence of a
Final State is specified by a pattern element).
Fig. 6. Subprogram
BuildDetFSM.
Authors
consider this example also a right balance between the textual and graphical
style of transformation specifications. Namely to make the example maximally
readable, explicit sets defined via associations from an instance and OCL set
operations are used in patterns. Certainly, the example could be specified
"100% graphically", using nested loops, but this seems not to be the
best choice. The used OCL elements are already implemented in MOLA tool.
In order to
make a diagram-based test driver for the example, the metamodel has to be
extended slightly. Classes for the diagram itself are added, as well as parts
of target model are made separate from source model. Fig. 7 shows the extended
metamodel.
Fig. 7.
Extended Metamodel of automatons
Accordingly,
the BuildDetFSM subprogram is extended by some scaffolding actions for building
the target diagram (actually, its domain counterpart) – see Fig. 8. All
temporary elements are also linked to this diagram – in order to make the
evaluation of test results easier.
Fig. 8.
Extended subprogram BuildDetFSM.
A
nodeterministic test automaton (diagram) is shown in fig.9, but its
determinization result in Fig. 10.
Fig. 9 Nondeterministic automaton
example Fig.
10 Result of determinization
To make the
tracing between these two automatons easier, part of the "debug tree"
is also shown:
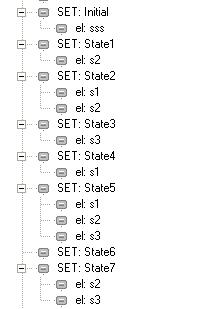
Thus it is
comparatively easy to ascertain that the transformation is correct (at least,
on this example).